Disabled person's follower
As bacaloreate project, I was 17 when I developed with 4 friends a robot whitch is capable to follow Disabled person's on a railstation
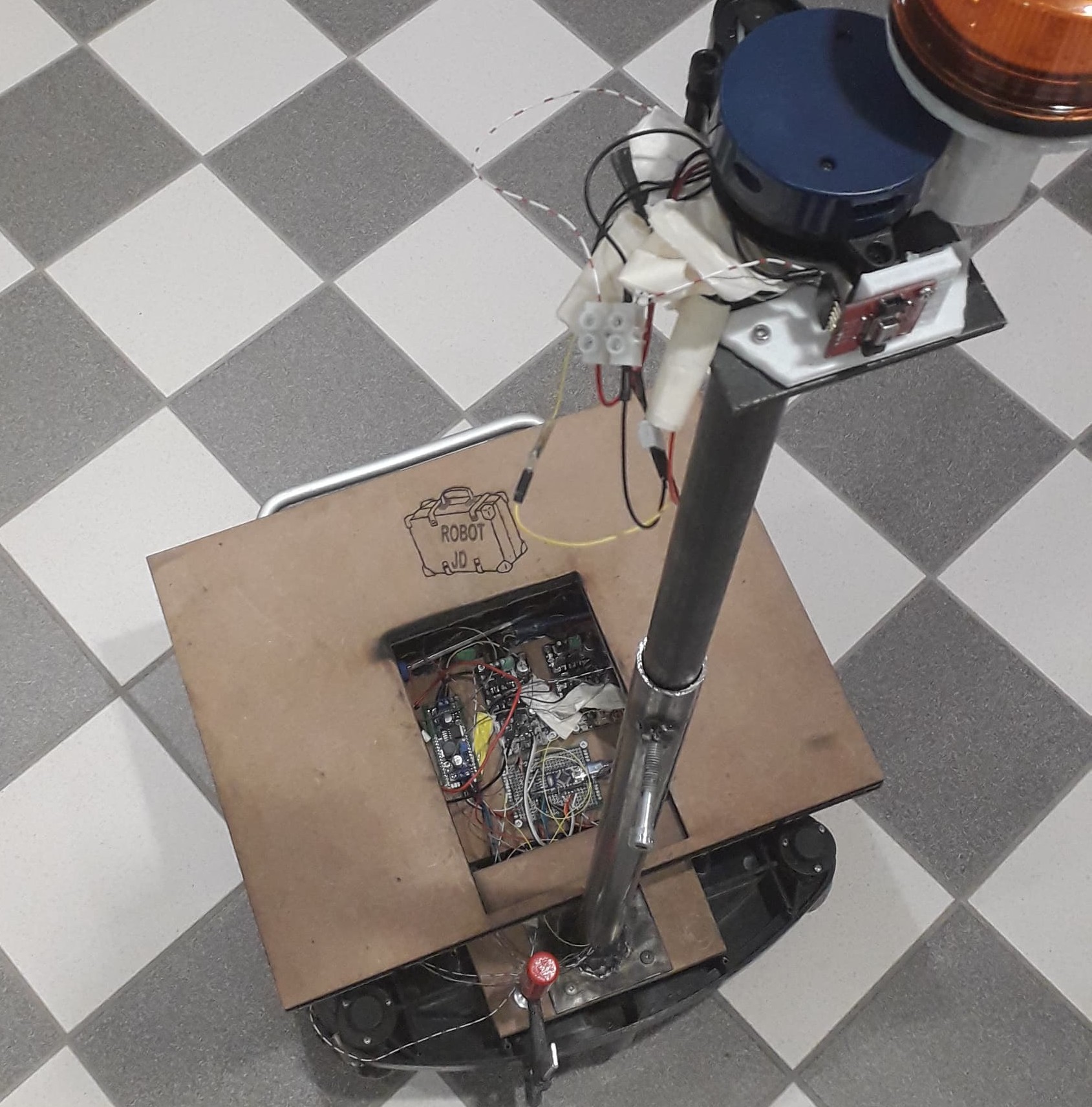
This robot uses the base of a mowing robot. It includes a 360° lidar sensor and a 64 pixels thermal camera to detect and track the user. I was in charge of developing the PID corectors, I also worked on the 3D modeling and the lidar function.